
Учебные материалы
Объявления
Конектбиофарм
Работа
Компании
Компьютерное моделирование жесткости телескопических аппаратов внешней фиксации (АВФ)
В практике травматологии и ортопедии известно, что жесткость сборки аппаратов внешней фиксации ( АВФ ) обеспечивает достаточную иммобилизацию и стабильную фиксацию костных отломков. Разработанные нами телескопические аппараты внешней фиксации представляют собой новый вариант спицестержневой системы для лечения больных травматологического и ортопедического профиля. При компьютерном исследовании напряженно-деформированного состояния отдельных элементов и конструкции в целом, строились математические модели с определенными допущениями, определяющие процесс работы аппарата (Карлов и др., 1996, 1998, 1999).
Так, элементы аппарата внешней фиксации апроксимировались нами следующими расчетными схемами. Спица рассматривалась как «натянутая нить» или упругая балка. Кроме предварительного натяжения на нее действует поперечная нагрузка. При этом допускалось, что поперечный размер спицы ничтожно мал по отношению к продольному. Концы спицы закреплялись на опорных сегментах аппарата внешней фиксации (опорах), обладающих определенной податливостью (жесткостью). Деформация спицы по схеме «натянутая нить» определялась посредством уравнения (1):
где Р - нагрузка, Е - модуль упругости материала спицы, F -площадь поперечного сечения спицы, u - прогиб спицы, N0 -натяжение спицы, k1, k2 - податливость опор.
Расчет прогибов спиц по схеме упругой балки с переменной жесткостью проводился по формуле (2):
![]()
где EJ (х) - жесткость балки на изгиб, у - прогиб балки, q (z) - поперечная нагрузка, х - координата вдоль оси балки-спицы.

Опора (сегмент) рассматривалась нами как балка переменного сечения. Нагрузка на нее задавалась в точках крепления спиц, а влияние отверстий учитывалось изменением изгибной жесткости. Опора по краям закреплялась жестко или шарнирно. Решаемое уравнение равновесия опоры (3) по форме и обозначениям аналогично формуле (2):
Граничные условия:
а) жесткое закрепление
у1(0)=0, y1(L)=0, у (0)=0, у (L)=0; (4)
б) шарнирное закрепление
у2(0)=0, y2(L)=0, у(0)=0, y(L)=0. (5)
При подборе соединительного стержня нами не учитывалась резьба, и за расчетный размер принимался его внутренний диаметр.
Материал всех элементов конструкции АВФ считался упругим. При этом для спиц допускалась пластическая деформация.
С целью получения параметров напряженно-деформационного состояния опорной балки решалось дифференциальное уравнение вида (3) с учетом граничных условий - жесткого (4) или шарнирного (5) закрепления.
Для решения задачи использовались численный конечно-разностный метод и алгоритм монотонной пятиточечной прогонки. В результате получилась зависимость «нагрузка-перемещение» (P≈U). Решая численно уравнения (1) и (2), получили зависимости P≈U с учетом начального натяжения спицы и податливости опоры для конкретного варианта крепления спицы.
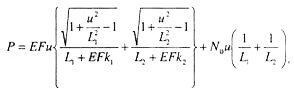
На рисунке 1 кривыми 1-10 графически показано изменение коэффициента податливости опоры при различных способах крепления спиц.
На рисунках 2 и 3 отражено влияние длины рабочей части спицы и величины предварительного натяжения на прогибы.
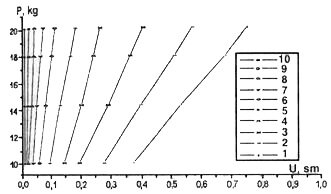
Рис. 1. Прогибы опорной планки при различных способах крепления спиц
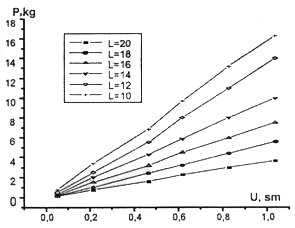
Рис. 2. Прогибы спиц U в зависимости от их длины L
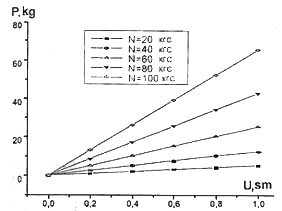
Рис. 3. Прогибы спиц U при различных величинах их предварительного натяжения N
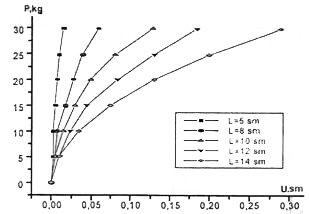
Рис. 4. Прогибы соединительных стержней разной длины L
Рисунок 4 демонстрирует влияние длины рабочей части соединительного стержня на жесткость сборки АВФ.
По результатам проведенных исследований можно ранжировать части аппарата внешней фиксации по их вкладу в общую жесткость системы. Обращает на себя внимание, что наибольший вклад в податливость сборки аппарата вносили жесткостные характеристики спиц. Управление данным фактором возможно двумя путями: изменяя либо длину рабочей части спицы, либо величину предварительного натяжения. Такая возможность предоставляется в телескопических аппаратах внешней фиксации. За счет более точной адаптации формы опорных рам к конфигурации сегмента конечности оптимизируется рабочая длина спицы, а спиценатягиватель с регулируемым натяжением позволяет управлять жесткостью спиц и системы в целом. Ограничением при натяжении является предел упругости материала спиц. Другими факторами, оказывающими влияние на жесткость сборки, являются длина рабочей части соединительного стержня и эксцентриситет приложенной к нему продольной нагрузки. И еще одним - влияние податливого опорного сегмента аппарата внешней фиксации: чем больше его диаметр и чем ближе к его центру точка закрепления спицы, тем меньше жесткость сборки (Karlov et al., 1996, 1998).
Анализ результатов 27 экспериментов показал, что осевые перемещения существенно влияли на жесткость сборки телескопических аппаратов внешней фиксации. Значимыми факторами являлись общая длина стоек и сборки меньшего диаметра. Установлено, что предварительное натяжение уменьшает максимальный прогиб спиц; оно должно увеличиваться с ростом ее рабочей части, но не превышать предел прочности их материала для телескопических аппаратов внешней фиксации; оно достигает 100 кГс, а в аппарате Илизарова - от 80-90 кГс (Bagnoli, 1986). Увеличивать прочность длинных стержней-стоек можно утолщением средней части при убранной резьбе. При этом жесткость сегмента при нагружении в плоскости опорного кольца выше, чем в перпендикулярном направлении. Поэтому для увеличения жесткости сборки спицу необходимо крепить ближе к узлам соединения сегментов со стержнями-стойками, а для уменьшения - ближе к вершине сегмента, чем задается напряжение всему аппарату внешней фиксации, что существенно влияет на жесткость системы в целом, а для спиц создаются благоприятные условия на весь период лечения больных.
При проведении стендовых испытаний аппарат внешней фиксации собирали в классическом и телескопическом вариантах. Результаты поэлементного исследования показали, что из трех основных элементов телескопических аппаратов внешней фиксации наиболее податливым является спица. Податливость спицы зависит от величины предварительного натяжения, которое можно дозировать с помощью спиценатягивателя. Однако прижимы, применяемые в аппаратах внешней фиксации, не всегда обеспечивают надежное удержание натянутых спиц.
Стержни-стойки за счет малого момента инерции, большой длины и большой жесткости в осевом направлении мало влияют на систему «опорное кольцо - спицы» и дают незначительный вклад в перемещение нагружаемой части спицы вдоль оси аппарата.
Экспериментальная оценка жесткости аппаратов Илизарова и телескопических аппаратов внешней фиксации в некоторых вариантах сборки при сжатии осевой силой на испытательном стенде показывают нелинейное поведение (с ростом диаметра опорных колец нелинейность увеличивается) каркасов спицевых аппаратов (рис. 5). Эта нелинейность, очевидно, вызвана нелинейным поведением наименее жестких элементов каркаса - тонких спиц.
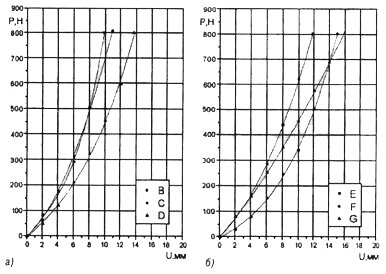
Рис. 5. Результаты испытания АВФ на сжатие осевой силой Р в разных вариантах сборки: а) Аппарат Илизарова: В - цилиндрический, d=150 мм; С - телескопический d=140-155-170-190 мм; D - цилиндрический, d= 190 мм; б) Телескопический АВФ: Е - телескопический, d=118-140-165-190 мм; F - цилиндрический, d=190 мм; G - цилиндрический d=190 мм с четырьмя стержнями
Введение в конструкцию 4 метафизарных стержней вместо спиц приближает характер жесткостного поведения каркаса к линейному и, соответственно, приводит к увеличению жесткости фиксации при нагрузке 600 Н по сравнению со спицевыми каркасами того же диаметра (рис. 5).
Более того, спицестержневые аппараты дают практически нулевую «усадку» при малоцикловом нагружении (рис. 6). Явление «усадки» проявляется как уменьшение первоначального зазора между половинами имитатора кости при нескольких первых циклах нагрузка-разгрузка.

Рис. 6. «Усадка» АВФ в разных вариантах сборки: а) Аппараты Илизарова: В - цилиндрический 6-150 мм; С - телескопический, d=140-155-170-190 мм, D - цилиндрический, d=190 мм; б) Телескопический АВФ: Е - телескопический, d=118-140-165-190 мм; F - цилиндрический, d=190 мм; G - цилиндрический, d-190 мм с двумя стержнями; Н - цилиндрический, d=190 мм с четырьмя стержнями
После 6-8 циклов величина зазора стабилизируется. Вызвано это явление следующими факторами. Во-первых - значительной концентрацией напряжений в материале спицы в местах ее крепления к опорному кольцу, где спица сминается фиксирующим болтом. Во-вторых - большим значением натяжения спицы при малых углах отклонения.
То есть, при первых циклах спица испытывает пластическую деформацию в узлах крепления до тех пор, пока угол отклонения спицы не достигает значения, когда действующие напряжения при нагрузке на аппарат 800 Н сравниваются с пределом текучести материала спицы. Стержни, вводимые вместо спиц, пластических деформаций не испытывают, поэтому система «аппарат - имитатор кости» возвращается в исходное состояние после снятия нагрузки без «усадки».
Спицевые АВФ испытывают значительную «усадку», которая сопоставима для разных диаметров каркасов, хотя и имеет тенденцию к увеличению с ростом диаметра каркаса, и составляет в среднем 4,8 мм после 4-6 циклов нагружения до уровня 800 Н (рис. 6, кривые В, С, D, Е, F).
Сравнение жесткости классического цилиндрического и телескопического вариантов сборки АВФ показывает преимущество телескопических каркасов по сравнению с обычными (рис. 7-10).
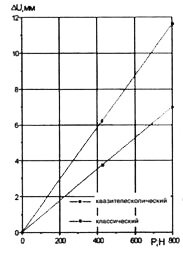
Рис. 7. Осевое сжатие
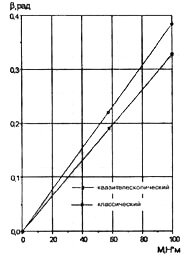
Рис. 8. Кручение вокруг оси
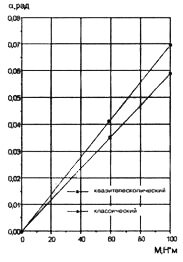
Рис. 9. Изгиб моментом вокруг оси х
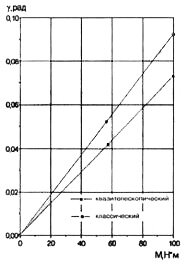
Рис. 10. Изгиб моментом вокруг оси Z
Это объясняется тем, что в телескопическом варианте нагрузка, действующая вдоль оси аппарата, воспринимается опорными плоскостями не одинаково. Плоскость с кольцом меньшего диаметра берет на себя большую часть нагрузки в основном из-за соответственно меньшей рабочей длины спиц. Это обстоятельство может иметь нежелательные последствия, связанные с возможностью прорезывания или разрушения кости спицами плоскости, воспринимающей наибольшую часть нагрузки. Для его устранения необходимо уменьшать предварительное натяжение спиц, закрепленных в кольцах меньшего диаметра. Однако это может привести и к снижению жесткости аппарата внешней фиксации (рис. 11).
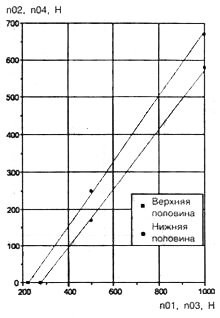
Рис. 11. Распределение нагрузки в телескопическом АВФ в зависимости от натяжения спиц на кольцах разного диаметра
Для цилиндрических аппаратов внешней фиксации осевая сжимающая нагрузка воспринимается одинаково всеми элементами, включая спицы. Причем изменение зазора между половинами кости будет равно удвоенному прогибу спицы с учетом жесткости кольца.
Сложнее дело обстоит с телескопическими аппаратами внешней фиксации. Как схематически показано на рисунке 12, размеры сборок «2 спицы + кольцо» различны, при одинаковом предварительном натяжении спиц различны и жесткости сборок и, следовательно, каждая из сборок пары, фиксирующей половину кости, воспринимает разную нагрузку, пропорционально жесткости. При этом диаметр опорных колец составил 190-165-140-118 мм. Это приводит к тому, что спицы наиболее нагруженной сборки (номер 2 и 4 на рисунке 12) могут разрушить костную ткань, что крайне нежелательно.
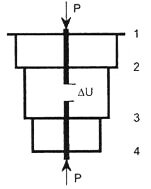
Рис. 12. Телескопический вариант сборки аппарата внешней фиксации с диаметром опорных колец 190-165-140-118 мм (соответственно номера сборок 1-2-3-4)
Другой вариант сборки телескопических аппаратов внешней фиксации заключается в использовании опорных колец одного диаметра в каждой паре, составляющей половину аппарата, т.е. 190-190-140-140 мм (рис. 13). При этом, задавая одинаковое предварительное натяжение всем спицам, можно быть уверенным, что распределение нагрузки по спицам также будет одинаковым.
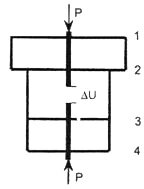
Рис. 13. Телескопический вариант сборки аппарата внешней фиксации, в котором используются кольца одного диаметра в каждой паре, составляющей половину аппарата: 190-190-140-140 мм (соответственно номера сборок 1-2 и 3-4)
Стендовые испытания показали, что телескопический вариант сборки аппарата внешней фиксации увеличивает жесткость системы на 17—20% по сравнению с классическими цилиндрическими аппаратами.
Таким образом, начальная жесткость каркаса аппарата внешней фиксации может быть повышена с помощью использования телескопического принципа (Karlov et al., 1999) за счет:
- увеличения предварительного натяжения спиц до 120-140 кг;
- крепления перекрещивающихся спиц на опорном кольце под углом между ними в пределах 60-90° и, что особенно важно, симметрично относительно вершин многогранника, чтобы рабочая длина спиц была одинакова;
- применения опорных колец возможно меньшего диаметра;
- установки стержней-стоек как можно ближе к местам крепления спиц;
- максимальной затяжки всех резьбовых соединений;
- частичной или полной замены спиц на стержни.
В процессе лечения жесткость системы можно регулировать путем снижения натяжения спиц; частичной разборкой каркаса и установкой опорных колец большего диаметра; перестановкой узлов крепления спиц или стержней с сохранением угла между ними в места более удаленные от стержней стоек и в места, несимметрично расположенные относительно вершин многогранного опорного кольца.
Наряду с достоинствами телескопические аппараты внешней фиксации обладают недостатками, связанными с большой «усадкой» аппарата при первых циклах нагружения, которая практически исчезает при частичной замене спиц на стержни. В ряде случаев стандартные зажимы (узлы крепления спиц) не всегда обеспечивают надежное удержание спиц от вытягивания при больших значениях предварительного натяжения спиц и нагрузки на аппарат. Если используются тонкие спицы, то эффективность работы жесткого каркаса может снижаться (Karlov et al., 1998, 1999).
А.В. Карпов, В.П. Шахов
Системы внешней фиксации и регуляторные механизмы оптимальной биомеханики
Подберём Вам бесплатно нужного врача-специалиста